I took the Tacklebot pictures with my Agfa e307 digital color camera. These are all JPEGs, 640x480, 24-bit color images. I like the quality of the camera's images, I just hate the PhotoWise software that shipped with it...
Tacklebot #1 (42K): I built Tacklebot by bolting a large tackle box onto a pair of gearhead motors and a swivel caster. TB has plenty of carrying capacity, owing to the large motors and batteries.
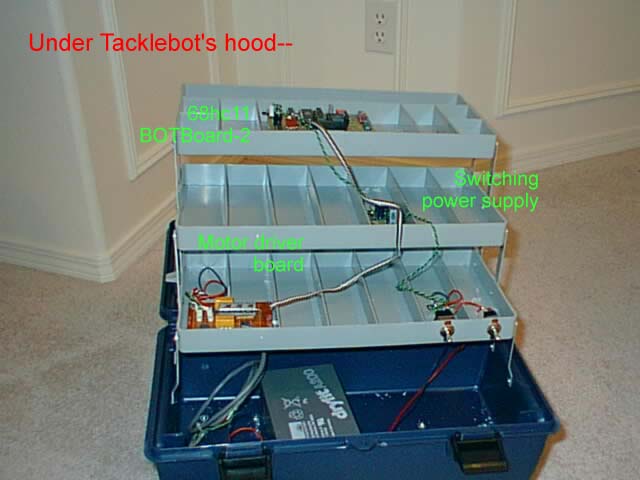
Tacklebot #2 (42K): A look under the hood. Tacklebot has a 68hc11 BOTBoard 2 onboard, with firmware written in SBasic. The current firmware lets me drive TB around using a tethered cable to a portable RS-232 terminal.
Tacklebot #3 (42K): Here is Tacklebot with the pull-out trays fully extended. This feature makes it so easy to work in the robot's guts. And TB can even carry a small toolset around inside, just so you don't forget a vital screwdriver or something.
I apologize right now for the size of some of these photos, but they really are worth the time to download. I used a high-quality Ricoh video camera with a Snappy frame capture system, then added text with the Fauve Matisse image editor.
Arnold (221K): A six-inch tall robo-pet driven by modified R/C servo motors, with a BOTBoard for a brain. Arnold sports IR object detection and a skirt of bumper switches. It uses furniture drawer knobs fore and aft as casters. The frame is a plastic, two-tiered base sold by Marvin Green. Marvin also sells the BOTBoard; great product.
Huey (218K): A seven-inch tall robo-pet, also driven by modified R/C servo motors. Huey was my first robot, and is still a favorite at the school science fairs. I built a custom 68hc11 board for Huey, and wrote the code in assembly language. The entire program fits in the 512 bytes of EEPROM in a 68hc11a1. Huey has IR object detection, a front bumper switch, and blinking LEDs to show current behavior.
RSG (184K): A shiny red Ready-Set-Go toy truck that I hacked by rewiring its MCU board. Full details on this hack will appear in an upcoming Nuts & Volts magazine article.
A stepper-based robot (200K): A motor base, used for experimentation. Overall length is about a foot. I used two of Bill Bailey's chopper driver boards to run the steppers. The gel-cell is rated 12 VDC at 1.3 Ahr; you can see the charging jack near the front, next to the wheel. I also used a National Semiconductor Simple-Switcher power supply, rated +5 VDC at 1 A, to provide power for the 68hc811e2 BOTBoard.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}